1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
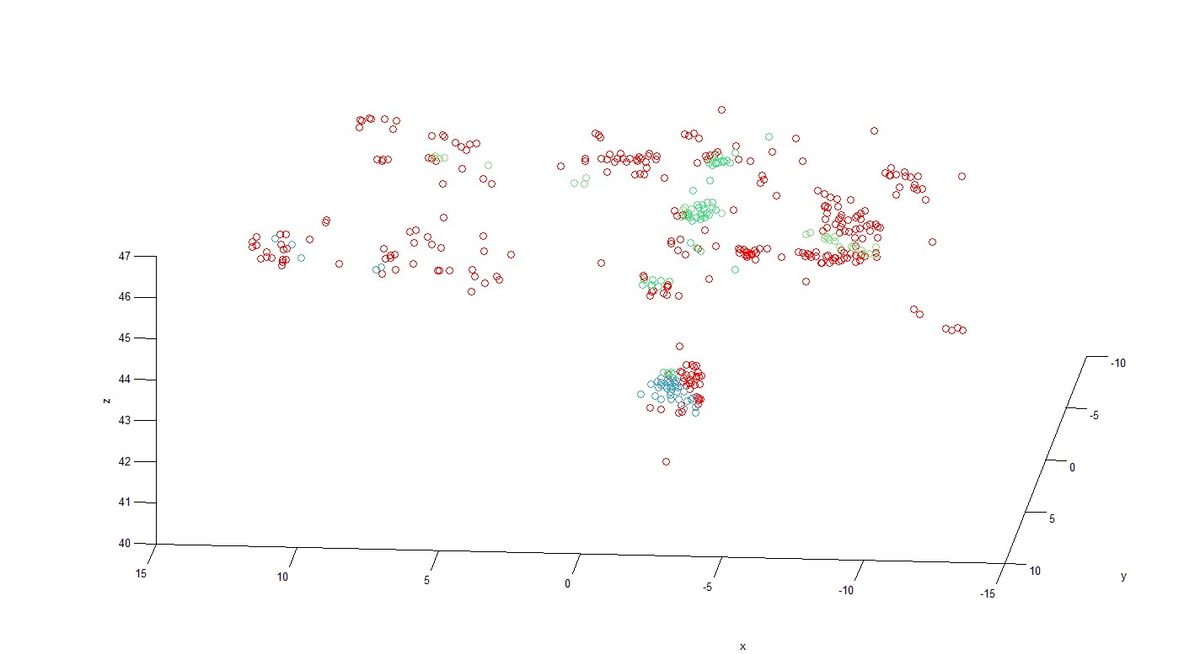
| plot3(data(:,1),data(:,2),data(:,3),'ro');
xlabel('x')
ylabel('y')
zlabel('z')
K=2000;
sigma=0.01;
pretotal=0;
planeNumber=10;
k=1;
i=0;
bestplane =zeros(planeNumber,4);
planeNo=1;
breakFlag = 0;
while planeNo <= planeNumber
while pretotal < 30 && k< K
SampIndex=floor(1+(size(data,1)-1)*rand(3,1));
sampFinderCounter = 0;
while(sum(isnan([data(SampIndex(1),:) data(SampIndex(2),:) data(SampIndex(3),:)])) ~= 0 || length([data(SampIndex(1),:) data(SampIndex(2),:) data(SampIndex(3),:)]) ~= length(unique([data(SampIndex(1),:) data(SampIndex(2),:) data(SampIndex(3),:)])))
SampIndex=floor(1+(size(data,1)-1)*rand(3,1));
sampFinderCounter = sampFinderCounter +1;
if(sampFinderCounter > 5000)
breakFlag = 1;
break;
end
end
if breakFlag == 1
break;
end
samp1=data(SampIndex(1),:);
samp2=data(SampIndex(2),:);
samp3=data(SampIndex(3),:);
plane = planeCreate([samp1;samp2;samp3]);
mask(planeNo,:)=abs(plane*[data ones(size(data,1),1)]');
total=sum(mask(planeNo,:)<sigma);
if total>pretotal
pretotal=total;
bestplane(planeNo,:)=plane;
end
k=k+1;
end
if pretotal<30 || breakFlag ~= 0
disp(breakFlag);
break;
end
mask(planeNo,:)=abs(bestplane(planeNo,:)*[data ones(size(data,1),1)]')<sigma;
hold on;
color(planeNo,:) = rand(1,3);
disp(['画第' num2str(planeNo) '个平面']);
for i=1:length(mask)
if mask(planeNo, i)
plot3(data(i,1),data(i,2),data(i,3),'o','color',color(planeNo,:));
data(i,:) = NaN;
end
end
planeNo = planeNo+1;
pretotal = 0;
k=1;
end
|